
Nā Robotics Logic Fuzzy
Mai ka hoʻolālā CAD e kāohi me kahi polokalamu hoʻokahi
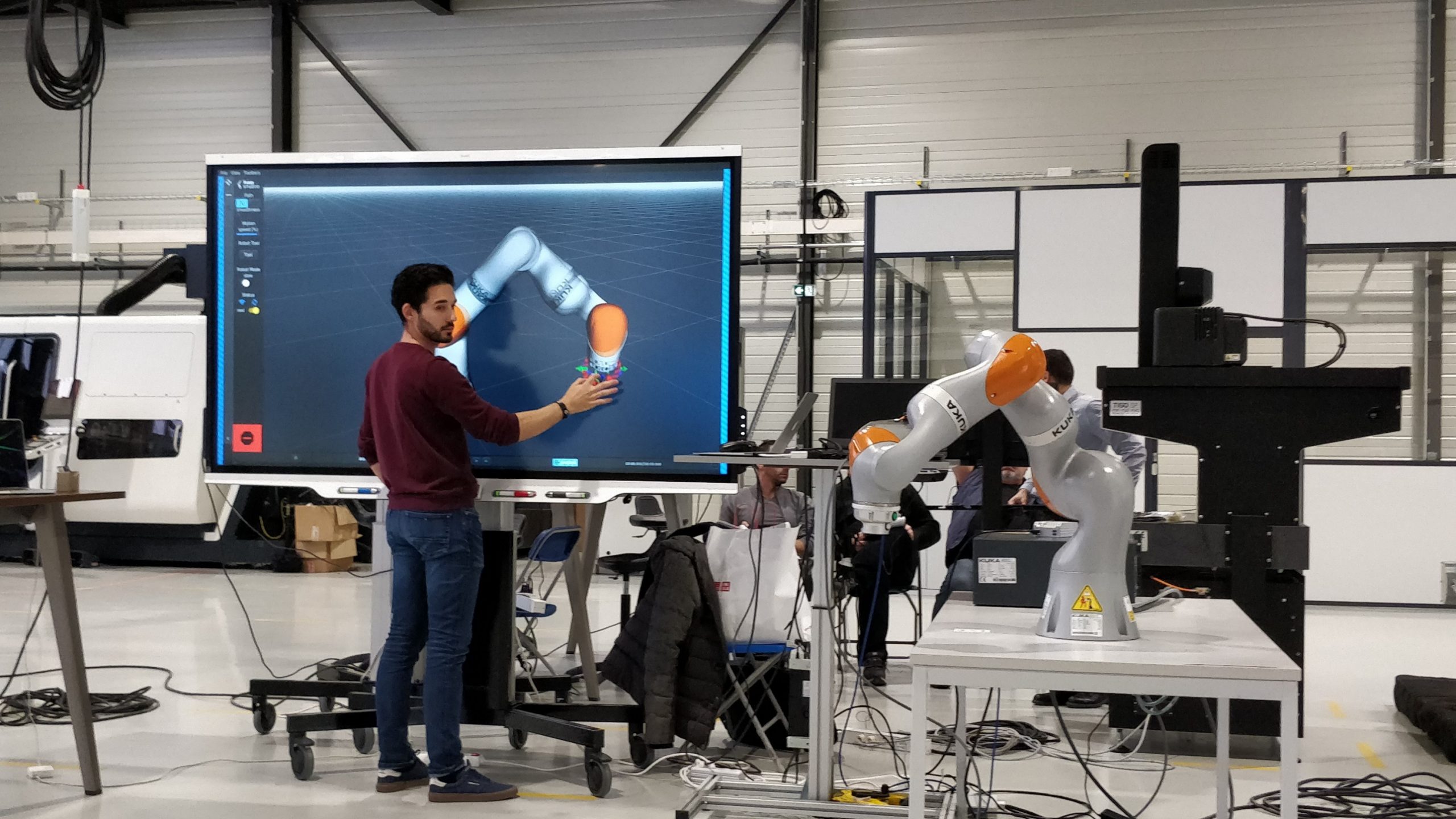
Nā Robotics Logic Fuzzy hoʻolaha i ka hōʻike o ka mana mua o Fuzzy studio™ ma ke kaulike ʻo Hannover Messe ʻoihana 2021 e hōʻailona ana i kahi huli i ka hana robotic maʻalahi.
➔ Ma ke kauō ʻana a hāʻule ʻana o nā ʻāpana CAD i kāu māhoe kikohoʻe 3D, hana maʻalahi ʻia nā toolpaths paʻakikī a hoʻouna ʻia i ka lopako hana me kahi kaomi hoʻokahi. ʻO nā mea āpau me kahi papahana polokalamu ākea.
➔ Mai ka hoʻohālikelike hoʻopahemo i ka kaohi manawa manawa maoli, ka polokalamu Fuzzy studioHoʻopau ʻo ™ i ke āpau ma waena o ka simulation a me ka ʻoiaʻiʻo e hōʻemi i ka downtime a hoʻonui i ka holomua o nā robotics.
➔ ʻenekinia mai ka honua a hōʻemi loa i ka pono no ka mākaukau lopako mahalo i ka ʻenehana kikoʻī kikoʻī kikoʻī ʻole kikoʻī.
➔ Hiki iā ʻoe ke hoʻololi i waena o nā lopako e hana a hoʻohālikelike me ʻelua mau kaomi e ʻike i ke koho kūpono no kāu noi, me ka ʻole o ka hoʻololi ʻana i ka polokalamu a i ʻole hana hou i nā hana hoʻolālā manawa lōʻihi.
➔ Hoʻopili ia i nā polokalamu robotic paʻakikī a hiki i nā ʻoihana o nā nui āpau.
ʻO ka paʻakikī a hiki i kēia manawa
He pipiʻi loa nā robots ʻoihana a hana pū kekahi e hoʻokō i ka hana maʻalahi ma muli o ka paʻakikī o ka polokalamu a me ka hoʻopili ʻana. I kēia manawa he mau palapala lawelawe lawelawe wale nō, e like me pick-and-place, hiki ke kiʻi ʻia i nā poʻe loea ʻole a no laila he kumu kūʻai no ka hana maʻalahi.
Eia nō naʻe, ʻo ka hapa nui o nā noi robot a me nā cobotics e koi i nā pono lako polokalamu paʻakikī a heterogeneous, a me nā loea māka. Pono kēia mau mea hana i kahi hoʻomaʻamaʻa nui a me ka ʻike.
ʻO ka hopena ʻoi aku ma mua o 75% o ka nui o ke koina o ka lopako (TCO) e pili ana i ka hoʻomaʻamaʻa ʻana a me nā lawelawe polokalamu no ka hana maʻamau maʻamau. I ka hana maʻalahi hiki i kēia helu ke lele i luna ma mua o 90% TCO a pēlā e luku ai i ka hoʻihoʻi kūpono i ka hoʻokomo kālā ʻana i ka ʻōnaehana robotic.
Pāʻoihana: he anu intuitive anuu no nā anuu a pau
Fuzzy studioʻO ™ he paepae polokalamu ākea a maʻalahi hoʻi e ʻoki ana i nā kumukūʻai papahana robotic e ka ʻumi. Me Fuzzy Studio ™ hiki ke hana maʻalahi ʻia i kekahi hale hana, maʻalahi a maʻalahi hoʻi ke kumukūʻai, ʻoiai me ka hana paʻakikī, ka hāʻawi ʻana a me ka hoʻopili ʻana i nā noi.
➔ Intuitive a maʻalahi hoʻi e like me ka pāʻani wikiō
➔ He kuʻina maʻamau no nā mana o nā robots
➔ ʻOihana kikoʻī a me ka hana no ka kaohi lopako manawa maoli
Uhi ʻo Fuzzy Studio ™ i nā pae āpau o ke ola o nā cell robotic, mai ka hoʻomākaukau papahana, hoʻolālā a me ke kauoha ʻana i ka kaohi hana manawa maoli, hoʻoponopono pūnaewele a me ka mālama ʻana.
Hoʻonohonoho ʻia e hōʻeleu i ka lawe a me ka hoʻohana ʻana i nā robotics e nā mea kuleana āpau, mai nā mea hana nui a i nā ʻoihana liʻiliʻi a me ka waena, nā mea hoʻopili pūnaewele a ʻo nā mea hana lopako OEM.

Koho i nā robots mai kahi waihona nui
E ʻimi i kahi hōʻiliʻili piha o nā lopako lopako mai nā mana kākoʻo a me nā kānana e nā hiʻohiʻona.
Kuhi i nā faila CAD a me 3D me ka maʻalahi
E hana koke i kahi ʻōnaehana robotic me ka 3D pono kikoʻī a me nā mea CAD pili pono. Nā kūmole i kākoʻo ʻia: ʻoi aku ma mua o 40 kūmole me ʻoihana STEP CAD a me IGES.
E ʻike i ka mea hana hoʻopau lima ʻākau
Koho mai nā koho a me nā pono hana hana nui a nui paha. Pākuʻi ʻia nā mea hana kākoʻo āpau a pāʻani maʻalahi.
Hana a hoʻololi i nā mea hana i ka ʻike maka
ʻAʻohe laina huikau o ka code a hoʻonohonoho i nā ʻōnaehana. Kūkulu nānā i nā ala pono hana. Hoʻololi i nā ala hele i ka manawa maoli a ʻike i nā loli i ka 3D.
Akomi hanauna o ka trajectory ma kauō a me ka hāʻule ana
Kauo a hoʻolei i nā mea 3D CAD i loko o ka hoʻolālā a me nā algorithms ponoʻī e hana aunoa i nā ala pono hana e pale ana i nā collision, mālama manawa, hoʻonui i ka hana a hoʻonui i ka palekana. ʻO nā hola kālepa o ka hana meticate i loko o kahi mau kaomi maʻalahi.
E hana i kahi kaʻina piha me ka ʻole o ka pāʻālua
Hoʻonohonoho i nā mea hana, nā pono hana, nā mīkini paʻi a hoʻopili pū i ka I / O. ʻAʻole pono e kākau kuhi.
E kuapo i nā robots a hoʻomau i ka hana
Mahalo i nā algorithms ponoʻī, hiki i nā mea hoʻohana ke hoʻololi i waena o nā robots me nā kaomi ʻelua ma ka hoʻolālā e ʻike i ka mea kūpono no kā lākou hana. Hoʻomaopopo hou ʻia nā alaloa a me nā kaʻina hana āpau a hiki ke hoʻoponopono maʻalahi ʻia nā launa ʻole.
Hoʻokahi kaomi kaomi
Mahalo i nā algorithms deterministic control manawa maoli "ʻo ka mea āu e ʻike ai i ka simulation ka mea āu e loaʻa ai i ka ʻoiaʻiʻo". Hiki ke hoʻokomo ʻia kahi noi piha me hoʻokahi kaomi ma ka robot hana a hoʻopaʻa i ke āpau ma waena o ka simulation a me ka ʻoiaʻiʻo. Mālama ʻia nā kaʻina hana a hoʻoponopono pololei a i ka manawa maoli.
E pili ana iā Fuzzy Logic Robotics
Nā Robotics Logic Fuzzy Ua ulu aʻe ia mai loko mai o nā keʻena noiʻi lopako alakaʻi o Farani a hoʻokumu ʻia e kahi hui Farani-ʻAmelika o nā loea robotics i ʻike i kahi ala hou e kāohi a hoʻolālā i ka hanauna hou o nā noi robot. Mahalo i kahi mea kūʻai aku kahiko i ka ʻoihana audiovisual, ua hoʻokumu nā mea hoʻokumu i kahi hopena hou loa i hiki i nā mea hoʻohana ʻike ʻole ke launa pū, kaohi a me ka hoʻolālā ʻana i nā robots ʻoihana no nā noi paʻakikī i hoʻokō ʻia e kekahi lopako. ʻO kā lākou ʻike i ʻae iā lākou e hoʻoili i kēia hana hou i ka ʻoihana.

ʻO kā mākou hihiʻo
Mai Geofumadas hauʻoli mākou e lawe iā ʻoe i nā nūhou e pili ana i ka honua geo. I kēia hihia, hōʻike ʻo Fuzzy Logic Robotics i kahi hopena e kōkua i nā kaʻina hoʻokele ʻikepili CAD i ka kaohi manawa maoli o nā robots. Lawe kuhi ʻole kēia iā mākou i ka mea a mākou e makemake ai i ka ʻenehana hanahana ʻehā, kahi e hana ai i nā kaʻina hana a hana ʻia nā kumuwaiwai kūpono no ka hoʻoponopono manawa ʻoi aku ka maikaʻi. ʻO ka mikiona a Fuzzy Studio e kōkua i ka hoʻololi hou i ka robotic automation ma o ka hoʻoholo ʻana i nā pilikia a me ka hoʻololi ʻana i ke ala e launa ai ka poʻe me ka hoʻohana ʻana i nā robots. Ke kono aku nei mākou iā ʻoe e kipa aku i ka pūnaewele Fuzzy Logic Robotics pūnaewele no ka ʻike hou aku e hoʻokaʻaʻike iā lākou ma ryan@flr.io anthony.owen@flr.io. E ʻike mākou i ka ulu ʻana o kēia hopena e hāʻawi iā ʻoe i nā kikoʻī a pau ma ka lima mua.



